|
I am a graduate student at the GRASP Laboratory, University of Pennsylvania. I am extremely fortunate to be advised by Dr. Vijay Kumar and Dr. Alejandro Ribeiro. Prior to UPenn, I earned my B.S. in Computer Engineering from the University of Michigan. Email / CV / LinkedIn / Google Scholar / Github |

|
|
My current research centers around artifical intelligence and robotics, with a specific focus on designing distributed multi-agent systems with graph neural networks and reinforcement learning. |
|
|
|
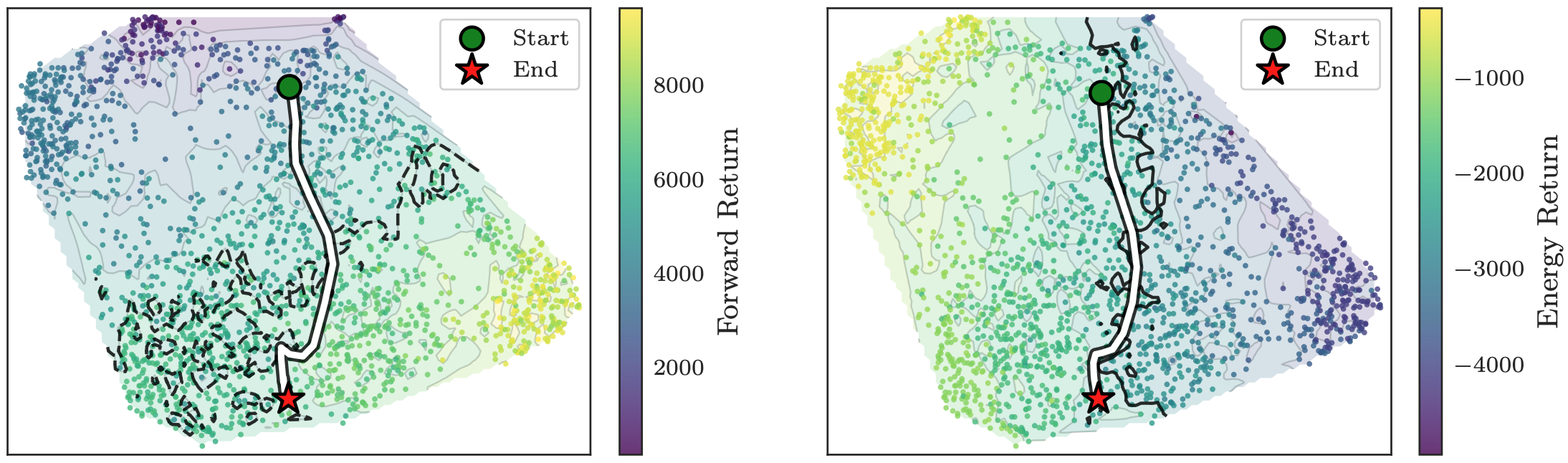
Beiming Li, Sergio Rozada, Alejandro Ribeiro Preprint. Arxiv | Code We propose to learn policy representations using a combination of variational generative modeling and contrastive learning, such that distances in the latent space align with differences in value functions. This geometry enables gradient-based optimization directly in the latent space. |

|
Yuezhan Tao, Eran Iceland, Beiming Li, Elchanan Zwecher, Uri Heinemann, Avraham Cohen, Amir Avni, Oren Gal, Ariel Barel, Vijay Kumar IEEE International Conference on Robotics and Automation (ICRA), 2024. Arxiv | Video We present an indoor exploration framework that couples deep-learning-based map predictor and reinforcement-learning-based navigation policy. |
|
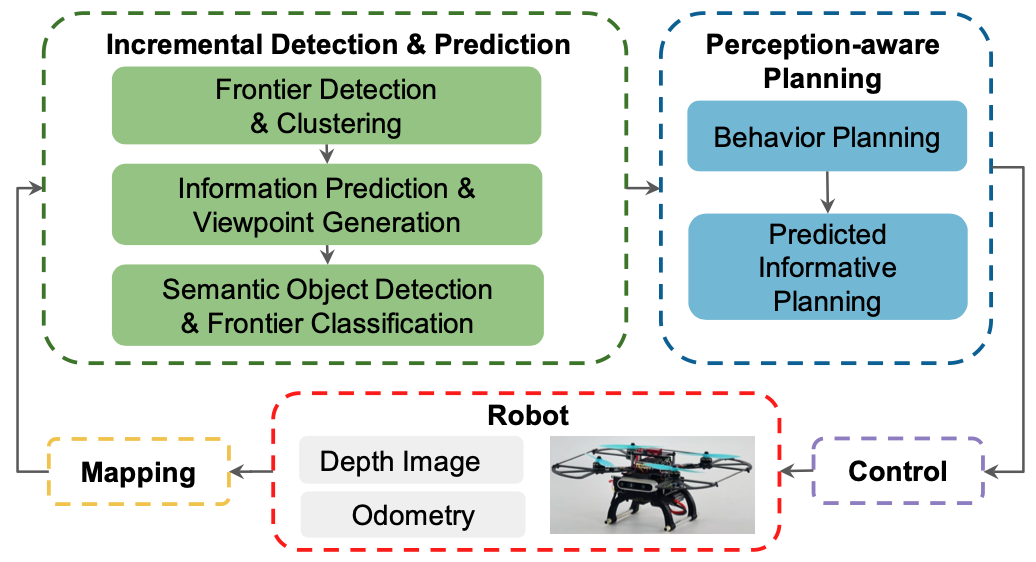
Yuezhan Tao, Yuwei Wu, Beiming Li, Fernando Cladera, Alex Zhou, Dinesh Thakur, Vijay Kumar IEEE International Conference on Robotics and Automation (ICRA), 2023. Arxiv | Code | Video We develop an indoor exploration framework that uses learning to predict the occupancy of unseen areas, extracts semantic features, samples viewpoints to predict information gains for different exploration goals, and plans informative trajectories to enable safe and smart exploration. |
|
|
|
ESE 650: Learning in Robotics |
|
|